Радиолокация
Содержание:
Как работает радиолокатор
Определение местонахождения чего-либо называют локацией. Для этого в технике применяют устройство, называемое локатором. Локатор излучает какой-либо вид энергии, например, звук или оптический сигнал, в сторону предполагаемого объекта, а затем принимает отражённый от него сигнал. Радиолокатор использует для этой цели радиоволны.
На самом деле радиолокатор, или радиолокационная станция (РЛС), — сложная система. Конструкции различных радиолокаторов могут различаться, но принцип их работы одинаков. Радиопередатчик посылает в пространство радиоволны. Достигнув цели, они отражаются от неё, как от зеркала, и возвращаются назад. Такая радиолокация называется активной.
Основные узлы радиолокатора (РЛС) – передатчик, антенна, антенный переключатель, приёмник, индикатор.
По способу излучения радиоволн РЛС делятся на импульсные и непрерывного действия.
Как работает импульсная радиолокационная станция?
Передатчик радиоволн включается на короткое время, поэтому радиоволны излучаются импульсами. Они поступают в антенну, которая располагается в фокусе зеркала параболоидной формы. Это нужно для того, чтобы радиоволны распространялись в определённом направлении. Работа радиолокатора похожа на работу светового прожектора, лучи которого подобным образом направляются в небо и, освещая его, ищут нужный объект. Но работа прожектора этим и ограничивается. А радиолокатор не только посылает радиоволны, но и принимает сигнал, отражённый от найденного объекта (радиоэхо). Эту функцию выполняет приёмник.
Антенна импульсного радиолокатора работает то на передачу, то на приём. Для этого в ней есть переключатель. Как только радиосигнал послан, отключается передатчик и включается приёмник. Наступает пауза, во время которой радиолокатор как бы «слушает» эфир и ждёт радиоэхо. И как только антенна улавливает отражённый сигнал, тут же отключается приёмник и включается передатчик. И так далее. Причём время паузы может во много раз превышать длительность импульса. Таким образом излучаемый и принимаемый сигнал разделяются во времени.
Принятый радиосигнал усиливается и обрабатывается. На индикаторе, который в простейшем случае представляет собой дисплей, отображается обработанная информация, например, размеры объекта или расстояние до него, или сама цель и окружающая её обстановка.
Радиоволны распространяются в пространстве со скоростью света. Поэтому, зная время tот излучения импульса радиосигнала до его возвращения, можно определить расстояние до объекта.
R = cˑt/2,
где с – скорость света.
Радиолокатор непрерывного действия высокочастотные радиоволны излучает непрерывно. Поэтому антенной улавливается также непрерывный отражённый сигнал. В своей работе такие РЛС используют эффект Доплера. Суть этого эффекта в том, что частота сигнала, отражённого от объекта, движущегося по направлению к радиолокатору, выше частоты сигнала, отражённого от объекта, удаляющегося от него, несмотря на то, что частота излучаемого сигнала постоянна. Поэтому такие РЛС используют для определения параметров движущегося объекта. Пример радиолокатора, в основе работы которого лежит эффект Доплера – радар, используемый сотрудниками ГИБДД для определения скорости движущегося автомобиля.
В поисках объекта направленный луч антенны РЛС сканирует пространство, описывая полный круг, либо выбирая определённый сектор. Он может быть направлен по винтовой линии, по спирали. Обзор также может быть коническим или линейным. Всё зависит от задачи, которую он должен выполнить.
Если необходимо постоянно следить за выбранной движущейся целью, антенна радиолокатора всё время направлена на неё и поворачивается вслед за ней с помощью специальных следящих систем.
Методы и оборудование
Все средства радиолокации по используемому методу разделяют на РЛС непрерывного и импульсного излучения.
Первые содержат в своем составе передатчик и приемник излучения, действующие одновременно и непрерывно. По этому принципу были созданы первые радиолокационные устройства. Примером такой системы могут служить радиоальтиметр (авиационный прибор, определяющий удаление летательного аппарата от поверхности земли) или известный всем автолюбителям радар для определения скоростного режима транспортного средства.
При импульсном методе электромагнитная энергия излучается короткими импульсами в течение нескольких микросекунд. После генерации сигнала станция ведет работу только на прием. После улавливания и регистрации отраженных радиоволн РЛС передает новый импульс и циклы повторяются.
Радиолокация
- Подробности
- Просмотров: 487
«Физика — 11 класс»
Обнаружение и точное определение местонахождения объектов с помощью радиоволн называют радиолокацией.
Радиолокационная установка — радиолокатор (или радар) — состоит из передающей и приемной частей.
В радиолокации используют электрические колебания сверхвысокой частоты (108 — 1011 Гц).
Мощный генератор СВЧ связан с антенной, которая излучает остронаправленную волну.
В радиолокаторах, работающих на длинах волн порядка 10 см и меньше, такая волна создается антеннами в виде параболических зеркал.
Для волн метрового диапазона антенны имеют вид сложных систем вибраторов.
При этом острая направленность излучения получается вследствие сложения волн.
Антенна устроена так, что волны, посланные каждым из вибраторов, при сложении взаимно усиливают друг друга лишь в заданном направлении.
В остальных направлениях происходит полное или частичное их взаимное гашение.
Отраженная волна улавливается либо той же излучающей антенной, либо другой приемной антенной, тоже остронаправленной.
Строгая направленность излучения позволяет говорить о луче радиолокатора.
Направление на объект и определяется как направление луча в момент приема отраженного сигнала.
Для определения расстояния до цели применяют импульсный режим излучения.
Передатчик излучает волны кратковременными импульсами.
Длительность каждого импульса составляет миллионные доли секунды, а промежуток между импульсами примерно в 1000 раз больше.
Во время пауз принимаются отраженные волны.
Определение расстояния R проводится путем измерения общего времени t прохождения радиоволн до цели и обратно.
Так как скорость радиоволн с = 3 • 108 м/с в атмосфере практически постоянна на всем пути луча, то
Вследствие рассеяния радиоволн до приемника доходит лишь ничтожная часть той энергии, которую излучает передатчик.
Потому приемники радиолокаторов усиливают принятый сигнал в миллионы миллионов раз (1012).
Такой чувствительный приемник, разумеется, должен быть отключен на время посылки импульса передатчиком.
Для фиксации посланного и отраженного сигналов используют электронно-лучевую трубку.
В момент посылки импульса светлая точка, равномерно движущаяся по экрану электронно-лучевой трубки, отклоняется.
На экране появляется всплеск около нулевой отметки шкалы дальности.
Светящееся пятнышко на экране продолжает равномерно двигаться вдоль шкалы и в момент приема слабого отраженного сигнала снова отклоняется.
Расстояние между всплесками на экране пропорционально времени t прохождения сигнала и, следовательно, расстоянию R до цели.
Это позволяет проградуировать шкалу непосредственно в километрах.
Радиолокационные установки обнаруживают корабли и самолеты на расстояниях до нескольких сот километров.
На их работу лишь незначительно влияют условия погоды и время суток.
В больших аэропортах локаторы следят за взлетающими и идущими на посадку самолетами.
Наземная служба передает по радио пилотам необходимые указания и таким образом обеспечивает безопасность полетов.
Корабли и самолеты также снабжены радиолокаторами, служащими для навигационных целей.
Такие локаторы создают на экране картину расположения объектов, рассеивающих радиоволны, и оператор видит радиолокационную карту местности.
В настоящее время применение радиолокации становится все более разнообразным.
С помощью локаторов наблюдают метеоры в верхних слоях атмосферы.
Локаторы используются службой погоды для наблюдения за обланами.
Локаторы используются в космических исследованиях.
Каждый космический корабль обязательно имеет на борту несколько радиолокаторов.
В 1946 г. в США и Венгрии был осуществлен эксперимент по приему сигнала, отраженного от поверхности Луны.
В 1961 г. учеными нашей страны произведена радиолокация планеты Венера, что позволило оценить период ее вращения вокруг своей оси.
В настоящее время осуществлена локация и других планет Солнечной системы.
Радиолокаторы используются для обнаружения самолетов и кораблей, в службе погоды, для локации планет и др.
Следующая страница «Понятие о телевидении. Развитие средств связи»
Назад в раздел «Физика — 11 класс, учебник Мякишев, Буховцев, Чаругин»
Электромагнитные волны. Физика, учебник для 11 класса — Класс!ная физика
Что такое электромагнитная волна —
Экспериментальное обнаружение электромагнитных волн —
Плотность потока электромагнитного излучения —
Изобретение радио А. С. Поповым. Принципы радиосвязи —
Модуляция и детектирование —
Свойства электромагнитных волн —
Распространение радиоволн —
Радиолокация —
Понятие о телевидении. Развитие средств связи —
Краткие итоги главы
Физика процесса: эффект Доплера, или «умное эхо»
Как и любое направление развития науки и техники, радиолокация базируется на некоторых физических основах, позволяющих обеспечивать решение стоящих перед ней задач, а именно: обнаруживать различного рода объекты и определять координаты и параметры их движения с помощью радиоволн.
Использование радиоволн, или, другими словами, электромагнитных колебаний (ЭМК), частотный диапазон которых сосредоточен в пределах от 3 кГц до 300 ГГц, определяет основные преимущества радиолокационных систем (РЛС) перед другими системами локации (оптическими, инфракрасными, ультразвуковыми). В первую очередь, это обусловлено тем, что закономерности распространения радиоволн в однородной среде достаточно стабильны как в любое время суток, так и в любое время года и, следовательно, изменение условий оптической видимости, обусловленных появлением дождя, снега, тумана или изменением времени суток, не нарушает работоспособность РЛС.
Основными закономерностями распространения радиоволн, которые позволяют обнаруживать объекты и измерять координаты и параметры их движения, являются следующие:
– постоянство скорости и прямолинейность распространения радиоволн в однородной среде (при проведении инженерных расчетов скорость распространения радиоволн принимают равной 3·10–8 м/с;
– способность радиоволн отражаться от различных областей пространства, электрические или магнитные параметры которых отличаются от аналогичных параметров среды распространения;
– изменение частоты принимаемого сигнала по отношению к частоте излученного сигнала при относительном движении источника излучения и приемника радиолокационного сигнала.
Последнее свойство радиоволн в радиолокации называют эффектом Доплера по имени австрийского ученого Кристиана Андреаса Доплера, который в 1842 году теоретически обосновал зависимость частоты колебаний, воспринимаемых наблюдателем, от скорости и направления движения источника волны и наблюдателя относительно друг друга.

Доплеровский метеорологический радиолокатор
В 1848 году эффект Доплера был уточнен французским физиком Арманом Физо, а в 1900 году – экспериментально проверен русским ученым Аристархом Белопольским на лабораторной установке. В этой связи в научно-технической литературе наименование данного эффекта можно встретить под названием «эффект Доплера – Белопольского».
Для проведения процедуры измерения расстояния до цели РЛС излучает в ее направлении зондирующий сигнал. Данный сигнал доходит до объекта, отражается от него и возвращается обратно к РЛС. Поскольку, как отмечалось ранее, скорость распространения радиосигнала в однородной среде постоянная, то для определения дальности до объекта необходимо зафиксировать момент излучения зондирующего сигнала t и момент приема отраженного сигнала от цели t1. В результате разность (t1 – t) позволяет определить время, в течение которого радиоволна проходит путь от РЛС к цели и обратно, которое равно 2Д, где Д – дальность до объекта (расстояние между РЛС и целью). Разность времен (t1 – t) в радиолокации называют временем запаздывания и обозначают как tд. В результате при известной величине tд можно составить равенство 2Д = Сtд, из которого следует, что дальность до объекта (цели) равна Д = Сtд/2.
Таким образом, подводя итог процедуре измерения дальности до цели, можно констатировать, что для измерения с помощью РЛС расстояния до цели необходимо определить время запаздывания tд, которое при известной скорости распространения радиоволн позволяет определить дальность до нее.
Большой процент объектов радиолокационного наблюдения составляют подвижные или движущиеся цели. К таким целям, например, относятся самолеты, вертолеты, автомобили, люди и т.д. Основным отличительным признаком таких объектов является скорость их движения. Выявить эффект движения цели, как отмечалось ранее, можно, опираясь на эффект Доплера, который позволяет определить радиальную скорость движения цели. То есть частота принимаемых РЛС колебаний от цели, двигающейся ей навстречу, возрастает по сравнению со случаем неподвижной цели и уменьшается при удалении цели от РЛС. Данное изменение частоты принимаемого сигнала называют доплеровским смещением частоты. Величина данного смещения зависит от скорости взаимного движения носителя РЛС и цели. Необходимо заметить, что рассмотренные свойства радиоволн будут проявляться вне зависимости от условий оптической видимости в зоне радиолокационного наблюдения.
Вторичный радиолокатор
Вторичная радиолокация используется в авиации для опознавания. Основная особенность — использование активного ответчика на самолётах.
Принцип действия вторичного радиолокатора несколько отличается от принципа первичного радиолокатора.
В основе устройства Вторичной радиолокационной станции лежат компоненты: передатчик, антенна, генераторы азимутальных меток, приёмник, сигнальный процессор, индикатор и самолётный ответчик с антенной.
Передатчик служит для формирования импульсов запроса в антенне на частоте 1030 МГц.
Антенна служит для излучения импульсов запроса и приёма отражённого сигнала. По стандартам ICAO для вторичной радиолокации антенна излучает на частоте 1030 МГц и принимает на частоте 1090 МГц.
Генераторы азимутальных меток служат для генерации азимутальных меток (англ. Azimuth Change Pulse, ACP) и метки Севера (англ. Azimuth Reference Pulse, ARP). За один оборот антенны РЛС генерируется 4096 малых азимутальных меток (для старых систем) или 16384 улучшенных малых азимутальных меток (англ. Improved Azimuth Change pulse, IACP — для новых систем), а также одна метка Севера. Метка севера приходит с генератора азимутальных меток при таком положении антенны, когда она направлена на Север, а малые азимутальные метки служат для отсчёта угла разворота антенны.
Приёмник служит для приёма импульсов на частоте 1090 МГц.
Сигнальный процессор служит для обработки принятых сигналов.
Индикатор служит для отображения обработанной информации.
Самолётный ответчик с антенной служит для передачи содержащего дополнительную информацию импульсного радиосигнала обратно в сторону РЛС по запросу.
Принцип действия вторичного радиолокатора заключается в использовании энергии самолётного ответчика для определения положения воздушного судна. РЛС облучает окружающее пространства запросными импульсами P1 и P3, а также импульсом подавления P2 на частоте 1030 МГц. Оборудованные ответчиками воздушные суда, находящиеся в зоне действия луча запроса, при получении запросных импульсов, если действует условие P1,P3>P2, отвечают запросившей РЛС серией кодированных импульсов на частоте 1090 МГц, в которых содержится дополнительная информация о номере борта, высоте и так далее. Ответ самолётного ответчика зависит от режима запроса РЛС, а режим запроса определяется интервалом времени между запросными импульсами P1 и P3, например, в режиме запроса А (mode A) интервал времени между запросными импульсами станции P1 и P3 равен 8 микросекундам и при получении такого запроса ответчик воздушного судна кодирует в импульсах ответа свой номер борта.
В режиме запроса C (mode C) интервал времени между запросными импульсами станции равен 21 микросекунде и при получении такого запроса ответчик воздушного судна кодирует в импульсах ответа свою высоту.
Также РЛС может посылать запрос в смешанном режиме, например, Режим А, Режим С, Режим А, Режим С.
Азимут воздушного судна определяется углом поворота антенны, который, в свою очередь, определяется путём подсчёта малых азимутальных меток.
Дальность определяется по задержке пришедшего ответа. Если воздушное судно находится в зоне действия боковых лепестков, а не основного луча, или находится сзади антенны, то ответчик воздушного судна при получении запроса от РЛС получит на своём входе условие, что импульсы P1,P3<P2, то есть импульс подавления больше импульсов запроса. В этом случае ответчик запирается и не отвечает на запрос.
Принятый от ответчика сигнал обрабатывается приёмником РЛС, затем поступает на сигнальный процессор, который проводит обработку сигналов и выдачу информации конечному потребителю и (или) на контрольный индикатор.
Плюсы вторичной РЛС:
- более высокая точность;
- дополнительная информация о воздушном судне (номер борта, высота);
- малая по сравнению с первичными РЛС мощность излучения;
- большая дальность обнаружения.
Как работает радиолокатор
Локацией называют способ (или процесс) определения месторасположения чего-либо. Соответственно, радиолокация – это метод обнаружения предмета или объекта в пространстве при помощи радиоволн, которые излучает и принимает устройство под название радиолокатор или РЛС.
Физический принцип работы первичного или пассивного радара довольно прост: он передает в пространство радиоволны, которые отражаются от окружающих предметов и возвращаются к нему в виде отраженных сигналов. Анализируя их, радар способен обнаружить объект в определенной точке пространства, а также показать его основные характеристики: скорость, высоту, размер. Любая РЛС – это сложное радиотехническое устройство, состоящее из многих компонентов.

В состав любого радара входит три основных элемента: передатчик сигнала, антенна и приёмник. Все радиолокационные станции можно разделить на две большие группы:
импульсные;непрерывного действия.
Передатчик импульсной РЛС испускает электромагнитные волны в течение краткого промежутка времени (доли секунды), следующий сигнал посылается только после того, как первый импульс вернется обратно и попадет в приемник. Частота повторения импульса – одна из важнейших характеристик РЛС. Радиолокаторы низкой частоты посылают несколько сотен импульсов в минуту.
Антенна РЛС фокусирует электромагнитный сигнал и направляет его, также она улавливает отраженный импульс и передает его в приемник. Существуют радиолокаторы, в которых прием и передача сигнала производятся разными антеннами, они могут находиться друг от друга на значительном расстоянии. Антенна РЛС способна испускать электромагнитные волны по кругу или работать в определенном секторе. Луч радара может быть направлен по спирали или иметь форму конуса. Если нужно РЛС может следить за движущейся целью, постоянно направляя на нее антенну с помощью специальных систем.
В функции приемника входит обработка полученной информации и передача ее на экран, с которого она считывается оператором.
Кроме импульсных РЛС, существуют и радары непрерывного действия, которые постоянно испускают электромагнитные волны. Такие радиолокационные станции в своей работе используют эффект Доплера. Он заключается в том, что частота электромагнитной волны, отраженной от объекта, который приближается к источнику сигнала, будет выше, чем от удаляющегося объекта. При этом частота испускаемого импульса остается неизменной. Радиолокаторы подобного типа не фиксируют неподвижные объекты, их приемник улавливает лишь волны с частотой выше или ниже испускаемой.

Также радиолокационные станции можно разделить по длине и частоте волны, на которой они работают. Например, для исследования поверхности Земли, а также для работы на значительных дистанциях используются волны 0,9—6 м (частота 50—330 МГц) и 0,3—1 м (частота 300—1000 МГц). Для управления за воздушным движением применяется РЛС с длиной волны 7,5—15 см, а загоризонтные радары станций обнаружения ракетных пусков работают на волнах с длиной от 10 до 100 метров.
Принцип действия
Радиолокация основана на следующих физических явлениях:
- Радиоволны рассеиваются на встретившихся на пути их распространения электрических неоднородностях (объектами с другими электрическими свойствами, отличными от свойств среды распространения). При этом отражённая волна, также, как и собственно, излучение цели, позволяет обнаружить цель.
- На больших расстояниях от источника излучения можно считать, что радиоволны распространяются прямолинейно и с постоянной скоростью, благодаря чему имеется возможность измерять дальность и угловые координаты цели (Отклонения от этих правил, справедливых только в первом приближении, изучает специальная отрасль радиотехники — Распространение радиоволн. В радиолокации эти отклонения приводят к ошибкам измерения).
- Частота принятого сигнала отличается от частоты излучаемых колебаний при взаимном перемещении точек приёма и излучения (эффект Доплера), что позволяет измерять радиальные скорости движения цели относительно РЛС.
- Пассивная радиолокация использует излучение электромагнитных волн наблюдаемыми объектами, это может быть тепловое излучение, свойственное всем объектам, активное излучение, создаваемое техническими средствами объекта, или побочное излучение, создаваемое любыми объектами с работающими электрическими устройствами.
Радар на борту
К идее использования радиолокационных средств на самолетах пришли несколько лет спустя после того, как появились первые наземные РЛС. Хотя в системах радионавигации и в приборах «слепой посадки» радиотехнические средства начали применяться уже с 1933 года.
В СССР именно наземная станция «Редут» явилась прототипом первой бортовой радиолокационной станции (БРЛС). Одной из основных проблем стало размещение аппаратуры на самолете – комплект станции с источниками питания и кабелями должен был весить примерно 500 кг. На одноместном истребителе того времени разместить такую аппаратуру было нереально. И выход был найден – разместить станцию было решено не на одноместном самолете, а на двухместном Пе-2.
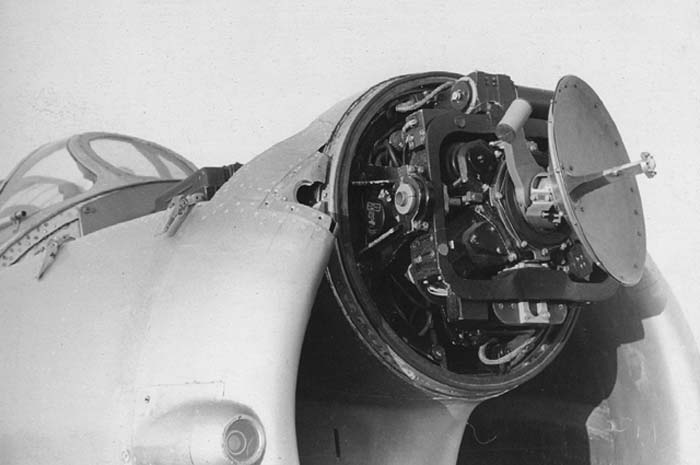
РЛС «Коршун» на МиГ-17П
Первая отечественная бортовая радиолокационная станция была названа «Гнейс-2», и в июне 1943 года она была принята на вооружение. К концу 1944 года было выпущено более 230 станций «Гнейс-2».
А в победном 1945 году началось серийное производство самолетной радиолокационной станции «Гнейс-5с». Дальность обнаружения цели достигала 7 км. Но главной новинкой этой модификации было то, что начиная с дальности 1,5 км данные воздушной обстановки дублировались на специальном индикаторе, установленном в кабине летчика. Это позволяло пилоту самостоятельно выводить самолет в атаку.
Дальнейшее развитие бортовых РЛС было связано с появлением реактивной авиации. Обнаружить самолеты и крылатые ракеты врага помогали такие установки, как «Изумруд», «Сокол» и «Сапфир» в различных модификациях.
Классификация

Мобильная РЛС «Противник-ГЕ»
По сфере применения различают:
- военные РЛС;
- гражданские РЛС.
По назначению:
- РЛС обнаружения;
- РЛС управления и слежения;
- панорамные РЛС;
- РЛС бокового обзора;
- метеорологические РЛС;
- РЛС целеуказания;
- РЛС контрбатарейной борьбы;
- РЛС обзора обстановки.
По характеру носителя:
- береговые РЛС;
- морские РЛС;
- бортовые РЛС;
- мобильные РЛС.
По типу действия:
- первичные, или пассивные;
- вторичные, или активные;
- совмещённые.
По методу действия:
- надгоризонтный радиолокатор;
- загоризонтный радиолокатор.
По диапазону волн:
- метровые;
- дециметровые;
- сантиметровые;
- миллиметровые.